In
aggiunta a ciò i progressi nel campo della microelettronica
conducono verso la realizzazione di dispositivi sempre
più piccoli ed economici, aumentando quindi ulteriormente
le potenzialità di questa tecnologia.
 Lobiettivo
dellanalisi del movimento è acquisire informazioni
quantitative per la descrizione dei movimenti risultanti
dallinterazione tra sistema nervoso, sistema muscolo-scheletrico
e sistemi sensoriali. Le informazioni dinteresse
possono riguardare il zione delle forze e coppie meccaniche
che risultano dallinterazione del corpo con lambiente
circostante, ovvero dallinterazione tra i vari segmenti
corporei. Lobiettivo
dellanalisi del movimento è acquisire informazioni
quantitative per la descrizione dei movimenti risultanti
dallinterazione tra sistema nervoso, sistema muscolo-scheletrico
e sistemi sensoriali. Le informazioni dinteresse
possono riguardare il zione delle forze e coppie meccaniche
che risultano dallinterazione del corpo con lambiente
circostante, ovvero dallinterazione tra i vari segmenti
corporei.
La sofisticazione dellanalisi può crescere ulteriormente,
con lintroduzione di metodi di analisi miranti alla
caratterizzazione movimento del centro di massa corporeo,
ovvero del corpo nel suo complesso, o ancora il movimento
di singoli segmenti corporei; talora, a tale livello
descrittivo di natura cinematica, si considera un ulteriore
livello, relativo alla dinamica del movimento, mediante
la caratterizzazione delle forze e coppie meccaniche
che risultano dallinterazione del corpo con lambiente
circostante, ovvero dallinterazione tra i vari segmenti
corporei.
La sofisticazione dellanalisi può crescere ulteriormente,
con lintroduzione di metodi di analisi miranti alla
caratterizzazione dello stato di attivazione muscolare,
mediante, ad esempio, lelettromiografia. Lanalisi
del movimento assume un ruolo di notevole rilevanza
in molteplici ambiti applicativi, in particolare dal
punto di vista clinico. Le procedure di valutazione
quantitativa del movimento possono consentire allo specialista
di affinare le capacità diagnostiche relative a patologie
che comportino alterazioni delle caratteristiche di
movimento rispetto ad una situazione di normalità, come
pure possono consentire la programmazione di specifici
interventi riabilitativi, di cui sia valutabile, in
modo obiettivo, lefficacia per il recupero funzionale
del paziente.
Da un punto di vista più strettamente bioingegneristico,
lanalisi del movimento, consentendo lo studio quantitativo
delle modalità di interazione paziente-ausilio, può
risultare di notevole utilità nelle fasi di progettazione
e validazione di ausili alla mobilità e manipolazione
funzionali. Lanalisi del movimento, infine, può accompagnarsi
ad altre analisi, anchesse miranti a fornire un profilo
delle capacità fisico-esecutive di un soggetto, non
necessariamente portatore di limitazioni funzionali,
per quanto attiene la valutazione funzionale delle capacità
cardiache e respiratorie, mediante, ad esempio, elettrocardiografi
e analizzatori di flusso respiratorio. Tale livello
descrittivo può svelare dettagli interessanti relativi
alla fisiologia dello specifico atto motorio, e contribuire
in modo decisivo alla definizione di modalità di esecuzione
del gesto che risultino ottimali dal punto di vista
dellutilizzazione delle risorse disponibili. Settori
di applicazione elettivi in questo contesto risultano
essere anche la medicina dello sport e lergonomia.
Le tecnologie attualmente disponibili per lanalisi
del movimento conducono in molti casi a soluzioni eccellenti
dal punto di vista della qualità del singolo rilievo
sperimentale, ferma restando lestrema difficoltà, in
generale, di produrre, dal complesso dei dati raccolti,
schemi interpretativi pienamente soddisfacenti. In questo
lavoro, non ci occuperemo di questultimo aspetto, decisivo
peraltro per la promozione dellanalisi del movimento
a disciplina insostituibile nella pratica medica e clinica.
Descriveremo piuttosto le tecnologie più promettenti
per la realizzazione dei sistemi per lanalisi del movimento
cosiddetti wearable (indossabili). Commenteremo le principali
ragioni atte a spiegare linteresse crescente per i
sistemi wearable basati sulla tecnologia dei sensori
inerziali, alla luce delle limitazioni operative, potremmo
dire strutturali, a cui sono soggetti i sistemi attualmente
in uso nei laboratori di analisi del movimento. Restringeremo
inoltre la nostra attenzione agli aspetti connessi con
il primo livello descrittivo del movimento il livello
cinematico.
Analisi del movimento in laboratorio
Attualmente i sistemi più usati per lanalisi del movimento
sono di tipo optoelettronico, e consentono la ricostruzione
della cinematica del movimento, attraverso limpiego
di markers attivi o passivi apposti in corrispondenza
di determinati punti di riferimento anatomici.
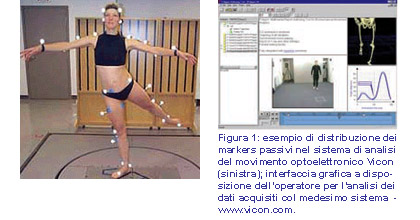
I markers passivi sono costituiti da materiale in grado
di riflettere le radiazioni emesse da un opportuno sistema
di illuminazione a determinate lunghezze donda (tipicamente
in prossimità dellinfrarosso); le onde riflesse possono
essere riprese da un sistema di telecamere, al fine
di consentire ad un sofisticato software di analisi
la successiva ricostruzione della posizione dei markers,
quindi dei punti anatomici corrispondenti, nello spazio
tridimensionale.
I markers attivi non necessitano di sistemi di illuminazione,
essendo essi stessi in grado di emettere la radiazione
necessaria per la localizzazione tridimensionale. In
ogni caso, dalla conoscenza delle coordinate tridimensionali
dei markers (figura 1), è possibile calcolare traiettorie,
grandezze angolari, procedendo, se desiderato, alla
stima delle velocità e delle accelerazioni mediante
tecniche di derivazione numerica.
La tecnologia dei sistemi per lanalisi del movimento
di tipo optoelettronico ha raggiunto, già a partire
dalla metà degli anni ottanta, livelli notevoli di sofisticazione,
sia per quanto riguarda gli aspetti relativi ai singoli
componenti hardware del sistema (telecamere con illuminazione
ad infrarosso ad elevata risoluzione spaziale e temporale,
schede elettroniche e processori per lacquisizione
dati) che al software di elaborazione.
Tuttavia, se pure limitiamo le nostre considerazioni
al livello cinematico di descrizione di un atto motorio,
risultano chiare alcune limitazioni dellapproccio che
potremmo definire tradizionale allanalisi del movimento.
A prescindere dalle considerazioni relative alla complessità
dei protocolli di valutazione attualmente in uso in
termini, ad esempio, del numero totale dei markers e
del tempo necessario per la somministrazione dei protocolli
stessi aspetti di natura più metodologica che tecnica
è importante sottolineare come il principale limite
dellapproccio tradizionale sia rappresentato dal fatto
che lanalisi del movimento deve necessariamente essere
condotta in uno spazio di lavoro limitato, che sia compatibile
con le caratteristiche del sistema di telecamere, in
termini di campo di vista usufruibile e di accuratezza
del processo di localizzazione. Ciò rende di fatto impossibile
utilizzare un sistema optoelettronico al di fuori del
contesto di un tipico ambiente di laboratorio. Da un
punto di vista applicativo, tuttavia, la misura di grandezze
fisiologiche e biomeccaniche risulta di particolare
interesse se condotta su soggetti nel corso dellesecuzione
di attività di vita quotidiana (activities of daily
living, ADL)[1]. Esistono infatti applicazioni che affidano
sia la valutazione diagnostica, sia la pianificazione
di programmi riabilitativi e di prevenzione alla possibilità
di acquisire informazioni di natura fisiologica e biomeccanica
su intervalli di tempo più o meno lunghi e in contesti
ADL. Esempi interessanti di dispositivi per il monitoraggio
a lungo termine sono i sistemi Holter per la registrazione
dellattività del muscolo cardiaco, e i sistemi di valutazione
dellattività fisica del soggetto, utili per la quantificazione
del livello di attività fisica e per la stima del dispendio
energetico connesso con tale attività. Generalmente,
per ragioni di portabilità e di convenienza, questi
ultimi sono basati su metodi di misura indiretti, così
da non obbligare il paziente a indossare sistemi di
monitoraggio spirometrico per lanalisi del flusso respiratorio,
la cui tollerabilità, su intervalli temporali di acquisizione
lunghi, risulta ovviamente discutibile [2].
Analisi del movimento mediante lapproccio dei sistemi
inerziali wearable
Di fondamentale importanza per la possibile implementazione
di sistemi wearable per lanalisi del movimento è la
disponibilità di dispositivi sensoriali in grado di
misurare il proprio stesso movimento (proprioceptive
motion sensing, PMS), in assenza di riferimenti esterni
quali possono essere offerti da tecnologie sensoriali
tipo radar, sonar, visione. Ad esempio, la ricostruzione
del movimento di un marker attivo operata da un sistema
di analisi del movimento tradizionale non rientra nel
modus operandi dei dispositivi PMS, essendo esso riferito
esternamente dal sistema di telecamere.
E da notare inoltre che, da molti anni oramai, veicoli
come aeroplani, navi, automobili risultano dotati di
dispositivi PMS. Particolarmente attraente a questo
riguardo, anche se non priva di notevoli difficoltà
realizzative, è la tecnologia dei sensori inerziali.

Fino ad oggi, tale tecnologia ha trovato impiego soprattutto
nei settori spaziale e automobilistico, a causa della
complessità degli apparati elettronici e dei costi elevati
relativi, in particolare, agli elementi sensoriali necessari
per il loro funzionamento. Le più recenti innovazioni
nel settore della tecnologia dei cosiddetti sistemi
microelettromeccanici (MEMS) hanno condotto a disporre
di sensori wearable di costo contenuto, dimensioni accettabili,
e con buone caratteristiche di accuratezza dal punto
di vista metrologico (figura 2) [3]. Sensori inerziali,
quali giroscopi e accelerometri, sono i sensori più
comunemente utilizzati nei sistemi wearable; talvolta,
viene proposto anche luso di sensori magnetici (magnetometri).
I giroscopi rispondono alla componente della velocità
angolare orientata nella direzione di un asse sensibile
che risulta determinato dalla struttura fisica del dispositivo
stesso. In commercio si trovano, generalmente, giroscopi
monoassiali, caratterizzati dalla presenza di un solo
asse sensibile; misurare le tre componenti del vettore
velocità angolare relativamente ad un sistema di riferimento
inerziale implica di conseguenza lintegrazione di tre
giroscopi monoassiali, con assi sensibili mutuamente
ortogonali. Gli accelerometri misurano le componenti
di accelerazione lineare lungo direzioni determinate
dalla struttura fisica del dispositivo stesso; in commercio,
è già possibile trovare accelerometri triassiali, con
direzioni sensibili a due a due ortogonali. I magnetometri,
infine, sono sensibili alle componenti di campo magnetico
orientate lungo specifiche direzioni: come nel caso
degli accelerometri, anche per i magnetometri è possibile
integrare fino a tre componenti mutuamente ortogonali.
I magnetometri triassiali possono rilevare la direzione
del nord geografico a partire dalla conoscenza della
loro orientazione relativamente al piano orizzontale;
tale conoscenza richiede la capacità di misurare linclinazione
mediante sensori inclinometrici. Poiché gli accelerometri
sono generalmente sensibili alleffetto gravitazionale,
il loro uso come inclinometri è possibile solo in condizioni
statiche: allorché il corpo rigido al quale sono solidali
è in movimento, diviene estremamente difficoltoso, se
non impossibile, discriminare nei segnali provenienti
dagli accelerometri le componenti dovute allaccelerazione
lineare propria del corpo rigido dalla componente gravitazionale.
Quindi, in un sistema wearable, i magnetometri, non
risentendo della forza di gravità, svolgono un ruolo
complementare rispetto a quello degli accelerometri.
 Le misure di velocità angolare fornite da giroscopi
a tre componenti possono essere integrate, al fine di
fornire indicazioni utili a ricostruire la storia degli
incrementi di orientazione del corpo rigido rispetto
al sistema di riferimento inerziale; ciò a partire da
condizioni iniziale di orientazione (assoluta) che sono
derivate dalluso combinato di accelerometri e magnetometri
(figura 3). Purtroppo, le stime di orientazione così
costruite possono essere mantenute accurate solo per
intervalli di tempo relativamente contenuti, a causa
delleffetto del rumore di misura e delle derive termiche
generalmente presenti nei segnali provenienti dai giroscopi.
Di conseguenza, si rende necessario limpiego di altri
sensori in grado di correggere le stime di orientazione
prodotte dai giroscopi. Ancora, il contributo degli
accelerometri (per movimenti particolarmente lenti)
e dei magnetometri può risultare determinante. Le stime
di orientazione possono infine essere utilizzate per
separare il contributo dellaccelerazione di gravità
dai segnali provenienti dagli accelerometri. Ricordando
che laccelerazione è la derivata prima della velocità
e la velocità è la derivata prima dello spostamento,
successive operazioni di integrazione numerica consentono
di stimare velocità e spostamento e di ricostruire la
traiettoria spaziale a partire da condizioni iniziali
che si devono assumere note. Anche nel caso degli accelerometri,
le operazioni di integrazione risultano particolarmente
suscettibili al rumore di misura e alle derive termiche.
Occorre infine ricordare che anche i dati dai sensori
magnetici possono essere di difficile interpretazione:
basti pensare agli effetti di disturbo determinati dal
fatto che masse ferrose poste nelle vicinanze di un
sensore magnetico possano modificare landamento delle
linee di forza del campo magnetico terrestre. Dalle
considerazioni precedenti, è evidente che, a prescindere
dalla disponibilità degli elementi sensoriali necessari
per il loro funzionamento, nei dispositivi inerziali
sia necessario disporre di sofisticati algoritmi di
elaborazione del segnale al fine di produrre stime accurate
di posizione e orientazione.
Le misure di velocità angolare fornite da giroscopi
a tre componenti possono essere integrate, al fine di
fornire indicazioni utili a ricostruire la storia degli
incrementi di orientazione del corpo rigido rispetto
al sistema di riferimento inerziale; ciò a partire da
condizioni iniziale di orientazione (assoluta) che sono
derivate dalluso combinato di accelerometri e magnetometri
(figura 3). Purtroppo, le stime di orientazione così
costruite possono essere mantenute accurate solo per
intervalli di tempo relativamente contenuti, a causa
delleffetto del rumore di misura e delle derive termiche
generalmente presenti nei segnali provenienti dai giroscopi.
Di conseguenza, si rende necessario limpiego di altri
sensori in grado di correggere le stime di orientazione
prodotte dai giroscopi. Ancora, il contributo degli
accelerometri (per movimenti particolarmente lenti)
e dei magnetometri può risultare determinante. Le stime
di orientazione possono infine essere utilizzate per
separare il contributo dellaccelerazione di gravità
dai segnali provenienti dagli accelerometri. Ricordando
che laccelerazione è la derivata prima della velocità
e la velocità è la derivata prima dello spostamento,
successive operazioni di integrazione numerica consentono
di stimare velocità e spostamento e di ricostruire la
traiettoria spaziale a partire da condizioni iniziali
che si devono assumere note. Anche nel caso degli accelerometri,
le operazioni di integrazione risultano particolarmente
suscettibili al rumore di misura e alle derive termiche.
Occorre infine ricordare che anche i dati dai sensori
magnetici possono essere di difficile interpretazione:
basti pensare agli effetti di disturbo determinati dal
fatto che masse ferrose poste nelle vicinanze di un
sensore magnetico possano modificare landamento delle
linee di forza del campo magnetico terrestre. Dalle
considerazioni precedenti, è evidente che, a prescindere
dalla disponibilità degli elementi sensoriali necessari
per il loro funzionamento, nei dispositivi inerziali
sia necessario disporre di sofisticati algoritmi di
elaborazione del segnale al fine di produrre stime accurate
di posizione e orientazione.
Esempi realizzativi
Considereremo nel seguito alcuni esempi di sistemi sensoriali
wearable per applicazioni di analisi del movimento costruiti
dallintegrazione di sensori giroscopici e accelerometrici
in un singolo dispositivo sensoriale.
Al riguardo, parleremo di nodi inerziali, con riferimento
al singolo dispositivo sensoriale, e di rete inerziale,
con riferimento allarchitettura risultante dallintegrazione
di un certo numero di nodi inerziali.
Nella maggior parte delle applicazioni riportate nella
letteratura specializzata, i nodi inerziali sono disposti
sul tronco e sugli arti. Sul tronco, le configurazioni
maggiormente considerate si riferiscono a punti di repere
anatomici, in corrispondenza dello sterno e delle vertebre
lombari. Nel primo caso, nodi inerziali giroscopici
sono stati proposti per la rilevazione automatica delle
transizioni seduto/in piedi, al fine di estrarre indicatori
numerici predittivi della suscettibilità a cadere da
parte del soggetto[ 4]. Nel secondo caso, nodi inerziali
accelerometrici sono stati proposti per il monitoraggio
degli spostamenti di punti di repere in corrispondenza
dei quali si può ritenere localizzato, con buona approssimazione,
il centro di massa corporeo; in tali sistemi esiste,
in linea di principio, la possibilità di riconoscere
il tipo di attività (riposo, cammino, salita/discesa
scale) ovvero di stimare il livello di attività fisica
e il relativo consumo energetico mediante tecniche di
analisi del segnale accelerometrico[5].
In questi ultimi casi è interessante notare che non
si richiede necessariamente di ricostruire la traiettoria
spaziale dei punti di repere compito che assorbe risorse
di calcolo non trascurabili; si vuole piuttosto estrarre
alcune caratteristiche, utili per la rilevazione delle
varie fasi del passo e la loro articolazione temporale,
ovvero, nelle applicazioni più sofisticate, per la stima
della distribuzione in frequenza della potenza statistica
del segnale[6]..
Per quanto concerne lapposizione di nodi inerziali
sugli arti, i punti di repere più frequentemente scelti
sono in corrispondenza della coscia, della caviglia,
del tallone e del collo del piede. Uno degli aspetti
di maggiore interesse, nelle applicazioni di reti inerziali
per lanalisi del cammino, è la possibilità, con buona
approssimazione, di poter considerare planare il movimento
tridimensionale da monitorare, assunzione che consente
di ridurre il numero di canali sensoriali e di semplificare
larchitettura interna del nodo inerziale[7]. Con unulteriore
assunzione relativa alla ciclicità del passo diviene
inoltre possibile realizzare accorgimenti atti a migliorare
laccuratezza delle elaborazioni del segnale: sfruttando
infatti il fatto che talvolta il punto anatomico monitorato
può essere fermo (es., durante la fase di appoggio),
diviene possibile utilizzare gli accelerometri come
inclinometri e correggere pertanto le stime di orientazione
prodotte dai giroscopi negli intervalli di tempo in
cui è rilevata lassenza di movimento[8].
Le ricerche attualmente in corso presso diversi laboratori
mirano a progettare e realizzare nodi inerziali con
elevate capacità di calcolo e pertanto in grado di trasmettere,
in tempo reale, le informazioni biomeccaniche raccolte
(es., la traiettoria di movimento del nodo inerziale)
ad un ulteriore nodo di elaborazione centrale, a cui
demandare il compito di animare la ricostruzione cinematica
del movimento del corpo umano sulla base di opportuni
modelli biomeccanici[ 9]. Alcuni semplici nodi inerziali
sviluppati dagli autori sono raffigurati in figura 4.
In figura, è presente anche un sensore di forza (force
sensing resistor, FSR), la cui funzione, essendo esso
in grado di misurare, qualora posto sotto la pianta
del piede, landamento della forza di contatto esercitata
durante lintera fase di appoggio, è di segmentare le
fasi del passo nellalternarsi ciclico di fasi di appoggio
e pendolazione.
Il nodo inerziale montato a livello lombare consente
la stima della potenza statistica del segnale accelerometrico
e di predire, in modo indiretto, la velocità media di
cammino in piano; i nodi inerziali in corrispondenza
della coscia poco sopra larticolazione di ginocchio
e della gamba poco sopra larticolazione di caviglia
consentono di implementare procedure di segmentazione
delle fasi del passo e di stimare lorientazione dellarto;
il nodo inerziale montato sul collo del piede consente
di implementare procedure di segmentazione delle fasi
del passo, e di ricostruire la traiettoria di movimento.
Dal confronto con le informazioni temporali fornite
dai sensori FSR, è possibile valutare laccuratezza,
la precisione e la robustezza del processo di segmentazione
guidato dai nodi inerziali. In figura 5 è rappresentata
una tipica traiettoria di movimento ricostruita dal
nodo inerziale al piede durante un movimento di salita
di tre scalini.
E immediato osservare la capacità del sistema di procedere
alla stima della pendenza del percorso sulla quale si
svolge lattività di deambulazione. Un ulteriore aspetto
del lavoro di ricerca degli autori è rappresentato dal
tentativo di incrementare la robustezza della rete inerziale
mediante lintroduzione di ulteriori dispositivi sensoriali,
la cui informazione possa essere utilizzata per correggere
le indicazioni relative alla traiettoria di movimento
fornite dai nodi inerziali. Occorre notare che la capacità
di un nodo inerziale di fornire informazioni accurate
può essere sensibilmente compromessa dagli effetti legati
al rumore di misura e agli effetti non facilmente controllabili
che variabili ambientali, ad esempio la temperatura,
possono avere nel condizionarne il funzionamento.
E questa una delle ragioni principali che suggerisce,
soprattutto nelle applicazioni outdoor che possono richiedere
la stima di parametri su tragitti lunghi e in condizioni
ambientali potenzialmente ostili, di integrare in una
rete inerziale dispositivi di localizzazione satellitare
(Global Positioning System, GPS)[10]. Essendo i ricevitori
GPS incapaci di fornire indicazioni attendibili in particolari
condizioni (ambienti indoor, canyon urbani, aree con
vegetazione densa), laddove cioè il riferimento esterno
costituito dalla costellazione dei satelliti in orbita
di cui hanno bisogno per funzionare risulta scarsamente
visibile, nodi inerziali e ricevitori GPS sembrano presentare
caratteristiche in un certo senso complementari. Tale
complementarietà rende estremamente attraente ed elegante
la possibilità di fondere le informazioni sensoriali
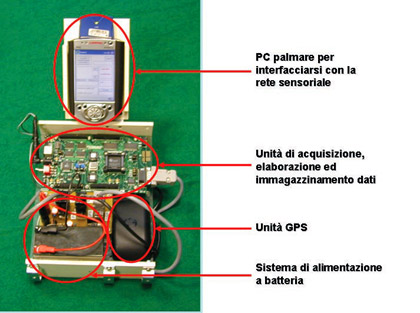
fornite dai due dispositivi. Il sistema in figura 6,
sviluppato dagli autori, integra un nodo inerziale posto
sul collo del piede con un ricevitore GPS. La scheda
di acquisizione raffigurata è in grado di svolgere tutte
le elaborazioni in tempo reale, consegnando i dati relativi
alla distanza percorsa, alle variazioni di livello,
alla velocità di cammino al dispositivo palmare, per
la visualizzazione sullinterfaccia grafica ivi implementata.
Unulteriore funzionalità è rappresentata dalla possibilità
di radio-trasmettere i risultati delle elaborazioni
eseguite in locale ad un personal computer remoto.
Conclusioni
In questo lavoro, si è visto che luso di sistemi inerziali
wearable offre la possibilità di eseguire analisi cinematiche
che possono superare, in linea di principio, le limitazioni
spazio-temporali ed economiche dellapproccio tradizionale
allanalisi del movimento (tests eseguibili solo allinterno
di un laboratorio specializzato e per intervalli di
tempo limitati, utilizzando sistemi di misura optoelettronici
relativamente costosi e complessi).
Questa prospettiva apre ai sistemi inerziali wearable
un ruolo complementare allapproccio tradizionale: occorre
rammentare che, ad oggi, i vantaggi succitati della
tecnologia inerziale sono compensati da una minore accuratezza
nella stima del movimento nelle sue componenti di traslazione
e di rotazione rispetto ai sistemi di misura optoelettronici.
Daltra parte la crescita di questa nuova tecnologia
si inserisce a pieno diritto nellambito della cosiddetta
ambient intelligence, unarea di ricerca che tende alla
progettazione, realizzazione ed applicazione di dispositivi
sempre più nascosti allinterno del mondo esterno,
in grado di farci comprendere e controllare meglio i
fenomeni naturali e artificiali che ci circondano.
Bibliografia
[1] Bussman J.B.J., Veltink P.H., Koelma F., Van
Lummel R.C., Stam H.J.: Ambulatory monitoring of
mobility- related activities: the initial phase
of the development of an activity monitor, Eur.
J. Phys. Med. Rehab., vol. 5, no. 1, pp. 2-7, 1997.
[2] Bouten C.V.C., Koekkoek K.T.M., Verduin M.,
Kodde R., Janssen J.D.:A triaxial accelerometer
and portable data processing unit for the assessment
of daily physical activity, IEEE Trans. Biomed.
Eng., vol. 44, no. 3, pp. 136-147, 1997.
[3] Verplaetse C.: Inertial proprioceptive devices:
self-motion-sensing toys and tools, IBM Systems
Journal, vol. 35, nos. 3&4, pp. 639-650, 1996.
[4] Najafi B., Aminian K., Loew F., Blanc Y., Robert
P. A.: Measurement of stand-sit and sit-stand transitions
using a miniature gyroscope and its application
in fall risk evaluation in the elderly, IEEE Trans.
Biomed. Eng., vol. 49, no. 8, pp. 843-851, 2002.
[5] Aminian K., Robert P., Jéquier E., Schutz Y.:
Incline, speed, and distance assessment during
unconstrained walking, Med. Sci. Sports Exerc.,
vol. 27, pp. 226-234, 1995.
[6] Sekine M., Tamura T., Akay M., Fujimoto T.,
Togawa T., Fukui Y.: Discrimination of walking
patterns using wavelet-based fractal analysis,
IEEE Trans. Rehab. Eng., vol. 10, no. 3, pp. 188-196,
2002.
[7] Mayagoitia R.E., Nene A.V., Veltink P.H.: Accelerometer
and rate gyroscope measurement of kinematics: an
inexpensive alternative to optical motion analysis
systems, J. Biomech., vol. 35, pp. 537-542, 2002.
[8] Sagawa K., Inooka H., Satoh Y.:Nonrestricted
measurement of walking distance, Proc. IEEE Internat.
Conf. on Systems, Man, and Cybernetics, vol. 3,
pp. 1847-1852, 2000.
[9] Bachmann E.R.: Inertial and magnetic tracking
of limb segment orientation for inserting humans
in synthetic environments, Ph.D. Thesis, Naval
Postgraduate School, Monterrey, CA, U.S.A., 2000.
[10] Terrier P., Ladetto Q., Merminod B., Schutz
Y.: High-precision satellite positioning systems
as a new tool to study the biomechanics of human
locomotion, J. Biomech., vol. 33, pp. 1717-1722,
2000. |
|


